Andreas Ziegler
Andreas Ziegler
Home
Posts
Teaching
Publications
Projects
Contact
Light
Dark
Automatic
Robotics
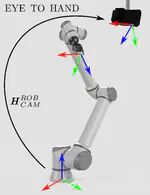
Event-camera, camera and robot arm calibration
The goal of the thesis is to develop new methods which can be used in a calibration toolbox, allowing to calibrate the system in an automatic fashion.
Feb 21, 2021
Spiking neural network for event-based ball detection
The goal of this thesis is to investigate and evaluate how a SNN can be used together with our event-based cameras to detect and track table tennis balls.
Feb 21, 2021
Exploration Without Global Consistency Using Local Volume Consolidation
In exploration, the goal is to build a map of an unknown environment. Most state-of-the-art approaches use map representations that …
Titus Cieslewski
,
Andreas Ziegler
,
Davide Scaramuzza
PDF
Cite
Project
Video
A Representation for Exploration that is Robust to State Estimate Drift
The goal of this thesis was to develop a (map) representation for exploration that is robust to state estimate drift.
PDF
Map Fusion for Collaborative UAV SLAM
The goal of this project was to develop a pipeline to merge maps created by different Unmanned Aerial Vehicles (UAVs) operating in the same area.
PDF
Code
Cite
×